Здравствуйте уважаемые блоггеры!
Хочу поделиться с миром своим опытом сборки робота на базе Arduio mega2560. Данный проект скорее всего подойдет начинающим робототехникам, в нем описан процесс сборки самодельного робота при минимуме комплектующих и запчастей.
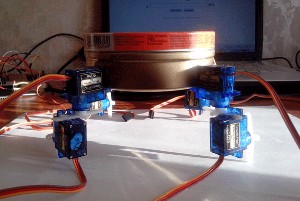
Внешний вид самодельного робота
Сомодельный робот представляет собой 4-х ногого паука, который может оценивать расстояние до препятствия и принимать определенное решение.
Итак, для того чтобы самому сделать своего первого робота нам понадобиться:
- ультразвуковой датчик рассояния - своего рода глаза робота;
- плата Arduino mega2560;
- 8 сервоприводов (далее просто приводов);
- корпус робота;
- соеденительные провода ;
- источник тока 5 Вольт.
Подбираем корпус или каркас робота
Сборку робота нужно начинать с подбора каркаса. Чтобы к нему можно было можно присоеденить ноги. Тут все огранничено вашей фантазией, главное чтобы в него влезла плата Arduino.
Я к примеру взял круглую банку из под каких то там конфет.
Делаем ноги робота
На каждую ногу приходится по два сервопривода . В качестве приводов использовал 9-ти граммовые S9G. Сначала склеиваем две сервы. Так как изображенно на рисунке.
Ноги приклеил по периметру банки на равных расстояниях. Как разделить окружность на 4 равные части говорить не буду - сами знаете.
Присоеденяем ноги к корпусу
Присоеденить ноги решил при помощи клеевого пистолета - такой специальный пистолет который клеет при помощи расплавленного пластика, который
имеет низкую температуру плавления, не дымит и безопасен для окружающих. Хочу сказать что очень даже удобная вещь для таких целей.
Подключаем соеденительные паровода
Тут в общем тоже ничего сложного нет имеем 3 провода на приводе.
Два из них это питание а другой управляющий. Все провода подключаем к плате arduino. Управляющие выводы втыкаются согласно номерам указанным в программе.
С процессом сборки робота можно подробнее ознакомиться в статье "как сделать робота своими руками" www.radio-magic.ru/arduino-projects/89-delayem-robota-arduino-2 на сайте Практическая радиоэлектроника.
Источник: Анатолий Валтасар 4 сентября 2014